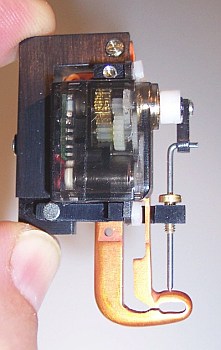

Left side
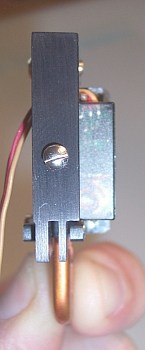
Back
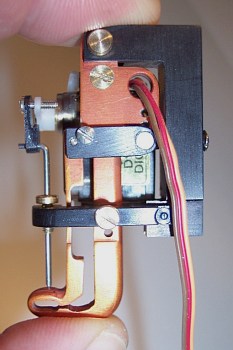
Right side
Front
This version has a mounting bracket and Hall switches as sensors. The Halls were not mounted when the photos were taken. They will each be inserted in a slot in the mounting bracket where they are secured with screws.
|
|
|
|
|
Left side |
Back |
Right side |
Front |
The only fixed part is the mounting bracket (the big L shaped thingy), which will be mounted from the top with one or two M3 screws. Allard's three element wing setup allows the whole unit to be suspended from the wing mount. The whole hook unit can be easily removed for servicing.
The hook itself swings back and forth similarly to conventional hooks. Since the Hall switch can be triggered with about 2 mm throw, this is about as much the hook will swing to trigger straight-circle tow. The bolt just visible in the front of the mount is the forward limit stop. Conventional hooks need more swing to operate circle tow rudder deflection. The small throw will give a more stable tow behaviour since the hook won't travel behind or close to the CG.
The mounting bracket has a 1.5 mm slit milled in the bottom. The hook movement Hall sensor can be slid in there and fixed with a small set screw. You can see a small 3 mm diameter magnet just in front of the sensor slit. It is visible below the servo on the left side of the hook.
The slit for the line tension sensor is just below the hole where the servo cable is guided through in the orange part. You can see two small threaded holes for the set screws that fix it in place. The horizontal black lever just below this is the crux of the Hall line tension sensor. The vertical orange lever moves down under tension as the hook flexes. A small 1 mm screw, visible as a silver dot, joins the vertical orange lever with the end of the horizontal black lever. The nearby black screw is the pivot point. At the other end of this black lever there is the 3 mm magnet. So, the 0.5 mm vertical movement of the orange vertical lever is amplified to become a few mm at the magnet. This is enough movement to trigger the Hall. The relative position of the Hall element sets the unlatch force.
The previous design (the purple one) worked well, however some timer software tweaking is required. The line tension measured by this sensor depends a lot on the angle of the towline in relation to the hook's vertical axis. If the line is pulled forward the switch triggers at lower force. Normally this is no problem since the model fuselage will orient itself perpendicular to the towline. However a launcher might release the model such that the towline pulls more forward. The timer program has a filter built in to ignore such short 'line tugs'. This works fine: both Arno Hacken and Allard are now flying with it.
If you use a clever timer, Hall power consumption is minimal. During tow the Halls are polled every 0.02 sec, every 5 seconds during the glide and are switched off during the bunt. All servo's are switched on and off separately. During tow and glide a servo is only switched on long enough to complete a movement. For the launch they are all on from unlatch until the end of the bunt transition. For the rest of the flight they are all off, so average power consumption is negligable. And now with the new Li-Poly batteries Allard has found he can fly three competitions without recharge. These are either 2 x 145 mAh (in parallel so 290 mAh), a Lipo single 310 mAh or 2 x 310 mAh (in parallel so 620 mAh). Neither Allard or Arno have had any problems with power consumption: a fully charged 110 mAh NiCad battery lasted 2 competitions.
The servo controlled rudder gives major advantages: